图论学习笔记
逃离地球
2019-07-23 16:22:36
# 图论学习笔记
最近本蒟蒻在复习图论,发现自己已经基本把图论给忘了,所以就打算写这样一篇学习笔记,用来复习。
## 一、图的表示
### 1.邻接矩阵
用一个二维数组存边,$map[i][j]=k$表示点$i$到点$j$权值为$k$。添边、查边复杂度都是$O(1)$,访问与所有一个点连接的点的复杂度为$O(v)$,占用空间较大,适合稠密图。
**模板:**
```cpp
int G[5000][5000], u, v, k, n, m;
scanf("%d%d", &n, &m);
for (int i = 0; i < m; ++i) {
scanf("%d%d%d", &u, &v, &k);
G[u][v] = k;
}
```
### 2.邻接表
用$n$个数组存储每个节点发出的边,占用空间较小,适合稀疏图。
**模板(vector方法):**
```cpp
#include<bits/stdc++.h>
using namespace std;
struct Node {
int v, k;
};
vector<Node> head[5000];
int main() {
int n, m, u, v, k;
scanf("%d%d", &n, &m);
for (int i = 0; i < m; ++i) {
scanf("%d%d%d", &u, &v, &k);
head[u].push_back((Node) {v, k});
}
return 0;
}
```
## 二、拓扑排序
[见这个博客](https://www.luogu.org/blog/juruoyqr/Topological-Sort)
## 三、最小生成树
### 1.定义
一个无向连通图的最小生成树是该图的一个子图,且是一棵树,包含图中的所有顶点,且边权和最小。
### 2.Prim算法
设一个点集$Q$中仅包含初始节点(可以是任意节点),寻找一条边$(u,v)$,满足点$u$在集合$Q$中,点$v$不在集合$Q$中,且边权是所有这样的边中最小的,则这条边是最小生成树中的一条边,将点$v$也加入集合$Q$中,重复这样的操作,直到集合$Q$中包含所有的节点。那么找到的所有的边的集合就是这个图的最小生成树。Prim算法主要利用了贪心的思路。
形象地说,就是在图上选一个点,然后在这个点的周围画一个圈。(如图)
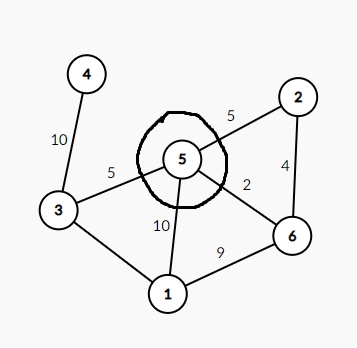
然后在和圈相交的边里面选一条权值最小的(在图中即5与6之间的边),再把这个权值最小的边指向的节点也围到圈里。(如图)
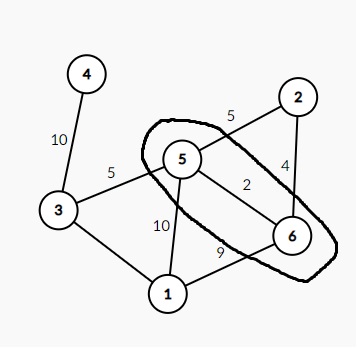
然后再找与圈相交的边权最小的边,并把指向的节点圈到圈里面,以此类推,直到圈里包含了所有的节点,那么所有选过的边就是这棵树的最小生成树。
**模板:**
```cpp
#include<bits/stdc++.h>
using namespace std;
const int INF = 1e9;
struct Node {
int v, k;
};
vector <Node> head[200002];
int q[200002], n, m, tot = 0; //q[i]表示点i是否在点集q中
priority_queue<pair<int, int> > p; //堆优化,记录节点i与点集q中一点相连的最短的边的权值
void Prim(int root) {
p.push(make_pair(0, root));
memset(q, 0, sizeof(q));
int u, v, k;
while (!p.empty()) {
k = p.top().first, u = p.top().second;
p.pop();
if (q[u]) {
continue;
}//节点u已经在集合q中,直接跳过
tot += k;
q[u] = 1;
for (int j = 0; j < (signed)head[u].size(); ++j) {
v = head[u][j].v, k = head[u][j].k;
if (!q[v]) {
p.push(make_pair(k, v));
}
}//更新p数组
}
}
int main() {
scanf("%d%d", &n, &m);
int x, y, z;
for (int i = 1; i <= m; ++i) {
scanf("%d%d%d", &x, &y, &z);
head[x].push_back((Node) {y, -z});
head[y].push_back((Node) {x, -z});
//由于优先队列是大根堆,就把边权取反,即可变成小根堆
}
Prim(1);
printf("%d\n", -tot);
return 0;
}
```
### 3.Kruskal算法
首先将所有的节点放入不同的点集中,每个点集中只有一个节点。然后进行遍历,寻找一条边$(u,v)$,满足节点$u$与节点$v$不在同一个集合中,且是满足这个条件的边中权值最小的。那么这条边就是最小生成树中的一条边。将节点$u$与节点$v$所在的集合合并,再进行查找边与合并集合的操作,直到所有的点都在同一个集合中,那么找到的所有的边的集合就是这个图的最小生成树。
Kruskal算法可以利用并查集实现。
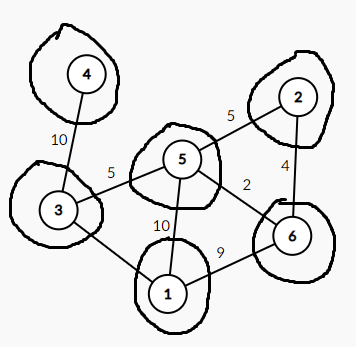
形象地说,就是在图中所有的节点周围都画一个圈(如图):
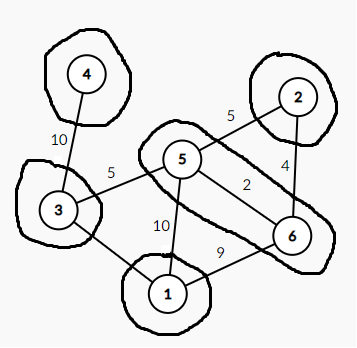
再在不被包含在一个圈里的的边(即与两个圈有交点的边)找到权值最小的边(在图中即5到6的边),把这两个圈合并。(如图)
然后重复这样的操作,直到所有的节点都在一个圈里,那么所有选过的边就是这棵树的最小生成树。
**模板:**
```cpp
#include<bits/stdc++.h>
using namespace std;
const int INF = 1e9;
int n, m, pre[200001], tot = 0, k = 0;
struct Node {
int u, v, k;
};
vector<Node> edge;//edge数组存边
//----------------------------------------并查集
inline int find(int x) {
int y = x, j;
while (x != pre[x])
x = pre[x];
while (y != x) {
j = pre[y];
pre[y] = x;
y = j;
}
return x;
}
inline void join(int x, int y) {
int pre_x = find(x), pre_y = find(y);
if (pre_x != pre_y) {
pre[pre_x] = pre_y;
}
}
//----------------------------------------并查集
bool cmp(Node x, Node y) {
return x.k < y.k;
}
void Kruskal() {
sort(edge.begin(), edge.end(), cmp); //将边按权值从小到大排序
int cnt = 0;
for (int i = 0; i < m; i++) {
if (cnt == n - 1) {
return;
}//边够了
int u = edge[i].u, v = edge[i].v, k = edge[i].k;
if (find(u) != find(v)) { //如果这条边可以选
join(u, v);
cnt++;
tot += k;
}
}
}
int main() {
scanf("%d%d", &n, &m);
int x, y, z;
for (int i = 1; i <= m; i++) {
scanf("%d%d%d", &x, &y, &z);
edge.push_back((Node) {x, y, z});
}
for (int i = 1; i <= n; i++) {
pre[i] = i;
}//并查集初始化
Kruskal();
printf("%d\n", tot);
return 0;
}
```
###4.Prim算法与Kruskal算法的区别
| 算法 | Prim | Kruskal |
| :-------- | --------: | :------: |
|时间复杂度 | $O(v*log(v))$ | $O(e*log(e))$ |
|适用范围 | 稠密图 | 稀疏图 |
注:$v$为点数,$e$为边数。
Prim算法需要通过堆优化后复杂度才能达到$O(v*log(v))$。
## 四、最短路
### 1.定义
>最短路问题(short-path problem)是网络理论解决的典型问题之一,可用来解决管路铺设、线路安装、厂区布局和设备更新等实际问题。基本内容是:若网络中的每条边都有一个数值(长度、成本、时间等),则找出两节点(通常是源节点和阱节点)之间总权和最小的路径就是最短路问题。——百度百科
说人话就是在选一条连接两个点的路径,使这条路权值和最小。
### 2.Dijkstra算法
Dijkstra算法是一个求单源最短路径的算法,**只适用于没有负权边的图**。Dijkstra算法与Prim算法有些类似,都是设一个点集$Q$,最初只有一个节点,然后不断地添点,直到全部添加。
设点集$Q$,最初只包含起点$u$。设$dis[i]$为目前找到的$u$点到编号为$i$的节点的最短路径,所有$dis[i]$初始化为INF,$dis[u]$初始化为$0$。首先寻找不在点集中且$dis$值最小的点$x$,将点$x$加入$Q$中,并进行松弛操作,即对于所有从$x$点出发的边$(x,y)$,$dis[y]=min(dis[y],dis[x]+w(x,y))$.然后再进行找点,加点与松弛的操作,直到所有点都被加入$Q$中为止。那么最短路就求出来了。
原理是由于图中没有负边,所以如果$dis[i]$为图中最小的,那么它就不可能再被更新,所以就可以被确定,即被加入点集$Q$中。
如果需要记录路径,那么就建立一个$father[n]$数组,$father[i]$表示$i$节点的上一个节点。每次进行松弛操作时,如果$dis[i]>dis[j]+w(i,j)$,那么就将$father[i]$赋值为$j$即可。
与Prim算法相似,Dijkstra算法也可以在找$dis$值最大的节点时利用堆进行优化。
**模板:**
```cpp
#include<bits/stdc++.h>
using namespace std;
const int INF = 1e9;
struct Edge {
int v, k;
};
vector<Edge> head[100001];
int dis[100001], q[100001];
struct Node {
int dis, u; //u:节点编号 dis:dis值
bool operator<(const Node& a) const { //运算符重载,以使用STL优先队列
return dis > a.dis;
}
};
int n, m;
void Dijkstra(int s) {
priority_queue<Node> que;//堆优化
bool vis[100001] = {0}; //是否被访问过
memset(dis, 0, sizeof(dis));
dis[s] = 0;
que.push((Node) {0, s});
while (!que.empty()) {
int u = que.top().u;
que.pop();
if (vis[u]) { //如果已经被访问过了,那么这个节点的dis值就是在松弛操作之前的dis值了,直接删除即可。
//由于松弛后的dis值一定小于松弛前的dis值,所以不用担心出错。
continue;
}
vis[u] = 1;
q[u] = 1;
for (int i = 0; i < (signed)head[u].size(); i++) {
int v = head[u][i].v, k = head[u][i].k;
if (!q[v] && dis[v] > dis[u] + k) { //松弛操作
dis[v] = dis[u] + k;
que.push((Node) {dis[v], v});
}
}
}
}
int main() {
int u, v, k, s;
scanf("%d%d%d", &n, &m, &s);
for (int i = 0; i < m; i++) {
scanf("%d%d%d", &u, &v, &k);
head[u].push_back((Edge) {v, k});
}
Dijkstra(s);
for (int i = 1; i <= n; i++) {
printf("%d ", dis[i]);
}
return 0;
}
```
### 3.Bellman-Ford算法
Bellman-Ford算法可以求有负权边的图的单源最短路径。算法是对$dis$数组进行$n-
1$(n 为节点个数)轮松弛操作。
原理是最短路一定经过$n-1$个节点(起点不算),即有$n-1$个$dis$值需要更新。每更新一个节点的$dis$值,其他的节点也可能会受到影响。故进行$n-1$轮松弛操作后可以保证求出最短路。
**模板:**
```cpp
#include<bits/stdc++.h>
using namespace std;
const int INF = 1e9;
struct Node {
int u, v, k;
};
vector <Node> edge;
int dis[100001];
int n, m;
void Bellman_Ford(int s) {
memset(dis, 0, sizeof(dis));
dis[s] = 0;
for (int i = 0; i < n - 1; i++) {
for (int j = 0; j < m; j++) {
int u = edge[j].u, v = edge[j].v, k = edge[j].k; //遍历每一条边,进行松弛
if (dis[v] > dis[u] + k) {
dis[v] = dis[u] + k;
}
}
}
}
int main() {
int u, v, k, s;
scanf("%d%d%d", &n, &m, &s);
for (int i = 0; i < m; i++) {
scanf("%d%d%d", &u, &v, &k);
edge.push_back((Node) {u, v, k}); //edge数组存边
}
Bellman_Ford(s);
for (int i = 1; i <= n; i++) {
printf("%d ", dis[i]);
}
return 0;
}
```
另外值得一提的是Bellman-Ford算法还可以判断图中是否存在负环(即权值和为负的环),只需要在进行n-1次操作后再进行一轮松弛操作,如果还有节点的$dis$值被更新,说明图中存在负环。
###4.SPFA算法
~~它不是死了吗~~
**S**hortest **P**ath **F**ast **A**lgorithm 算法是Bellman-Ford算法的队列优化版本。
我们可以发现,如果一个点的$dis$值更新了 ,那么与这个节点相邻的节点的$dis$值都可能会受到影响。所以我们可以建一个队列,存放等待更新的节点,并每次对队首的节点进行松弛操作并把所有与队首相连的节点入队,并把队首pop出去,重复进行这样的操作,直到队列为空。
**模板:**
```cpp
#include<bits/stdc++.h>
using namespace std;
const int INF = 10e9;
int n, m, dis[100001];
struct Node {
int v, k;
};
vector<Node>head[100001];
void SPFA(int s) {
bool vis[100001];//vis数组记录是否在队列中
queue<int> que;
que.push(s);
for (int i = 0; i <= n; i++) {
dis[i] = INF;
vis[i] = 0;
}
vis[s] = 1;
dis[s] = 0;
while (!que.empty()) {
int num = que.front();
que.pop();
vis[num] = 0;
for (int i = 0; i < head[num].size(); i++) { //对队首进行松弛操作
if (dis[head[num][i].v] > dis[num] + head[num][i].k) {
dis[head[num][i].v] = dis[num] + head[num][i].k;
if (!vis[head[num][i].v]) { //如果队首更新,就把与队首相邻的节点入队
que.push(head[num][i].v);
vis[head[num][i].v] = 1;
}
}
}
}
}
int main() {
int s, x, y, z;
Node a;
scanf("%d%d%d", &n, &m, &s);
for (int i = 1; i <= m; i++) {
scanf("%d%d%d", &x, &y, &z);
head[x].push_back((Node) {y, z});
}
SPFA(s);
for (int i = 1; i <= n; i++) {
printf("%d ", dis[i]);
}
return 0;
}
```
###5.Floyd-Warshall算法
Floyed-Warshall算法可以求出多源最短路径,即求出任意两点之间的最短路径。Floyd-Warshall算法的本质是动态规划。设$dis_{k}[i][j]$表示节点$i$和节点$j$之间的一条仅经过编号最大不超过$k$的节点最短路径的长度,那么显然$dis_{0}[i][j]=w(i,j)$,因为$k$=0,所以路径中不能经过其他节点。
那么如何从$dis_{k-1}[i][j]$推出$dis_{k}[i][j]$呢?我们需要分两种情况:
1. $dis_{k}[i][j]$是一条不经过$k$节点的路径的长度,那么$dis_{k}[i][j]=dis_{k-1}[i][j]$.
2. $dis_{k}[i][j]$是一条经过$i$节点的路径的长度,那么$dis_{k}[i][j]=dis_{k-1}[i][k]+dis_{i-1}[k][j]$ (将这条路径分为两部分)
由此我们可以得到状态转移方程:
$dis_{k}[i][j]=max(dis_{k-1}[i][j],dis_{k-1}[i][k]+dis_{k-1}[k][j])$
**模板:**
```cpp
#include<bits/stdc++.h>
using namespace std;
const int INF = 1e9;
int n, dis[1001][1001];
void Floyd_Warshall() {
for (int k = 1; k <= n; k++) { //循环k的值
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= n; j++) {
if (dis[i][k] != INF && dis[k][j] != INF && dis[i][k] + dis[k][j] < dis[i][j]) { //状态转移
dis[i][j] = dis[i][k] + dis[k][j];
}
}
}
}
}
int main() {
scanf("%d", &n);
int x, y, z;
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= n; j++) {
scanf("%d", &dis[i][j]);
if (dis[i][j] == -1) {
dis[i][j] = INF;
}
}
}//邻接矩阵存图
Floyd_Warshall();
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= n; j++) {
if (dis[i][j] == INF)
printf("-1 ");
else
printf("%d ", dis[i][j]);
}
printf("\n");
}
return 0;
}
```
#### update on 2019/11/12:改变了码风,修改了一些错误,Prim算法增加了堆优化。