向量
tsqtsqtsq0309
·
·
学习·文化课
更好的阅读体验
向量
一、向量的线性运算
1.1定义
有向线段即为向量(有方向、有大小)
引入向量能干嘛?可以简化方程。
例:
F_x(x)=ma_x\\ F_y(x)=ma_y\\ F_z(x)=ma_z\\
这是三维各个方向上的向量公式,但是我们可以把它写成
\vec{F}=m\vec{a}\\
这样就达到了简化方程的目的,更简单,但是内涵更加丰富!
1.2向量的分类
1、自由向量(可以自由平移)
举例:位移 \Delta\vec{r} 、速度 \vec{v} 、加速度 \vec{a}
解释:因为我们不关心这个向量的位置,所以干脆让它自由平移算了。比如开高速的时候,我们考虑不要超速,那这时候我们只要考虑汽车的速度,把汽车想象成箭头(箭头越长,速度越快),那我们就不用考虑汽车的位置了,只要汽车在高速上,并且汽车不超速就可以就行。同样的,只要这个速度向量在我脑子里,而且我不关心它的位置,那它就能在我脑子里乱跑,但是大小和方向不变。
2、滑移向量(可以沿着某一方向平移)
举例:力 \vec{F}
解释:因为有一类向量,它的作用效果和作用位置是有一定差别的,力就是很典型的例子,但在某些情况下这个力可以沿着作用方向平移。我用一个力拉一个箱子,或者改用另外一个力推箱子,两者作用效果是相同的,因此我们可以看成这个力平移了一部分,但是作用结果却没变。
3、固定向量(不能平移)
举例:位矢 \vec{r}
解释:拿最一般的跑100m举例子,我们不得不关心运动员的位置了,因此我们从每个运动员的起点处开始,画一个箭头指向运动员现在的位置,因此我们就能判断出谁是第一了,因为谁的箭头在前谁就是第一了。这时候位矢就不能随便平移了。
tips:大家需要区分位移 \Delta\vec{r} 、位置的向量(位矢) \vec{r} 、位矢的变化量 \Delta r 的三个概念。
1.3向量的性质
(1)向量的大小
|\vec{A}|=A\\
向量的大小,又叫向量的模。
(2)单位向量
\hat{A}=\frac{\vec{A}}{|\vec{A}|}\\
### 1.4向量的线性运算
(1)数乘
$$
\vec{A}=b\vec{C}\\
$$
简单地说, $\vec{C}$ 扩大 $b$ 倍就是 $\vec{A}$ ,如果 $b$ **是负数**那就把 $\vec{C}$ 反向。
(2)加减法
$$
\vec{C}=\vec{A}+\vec{B}\\
\vec{D}=\vec{A}-\vec{B}\\
$$
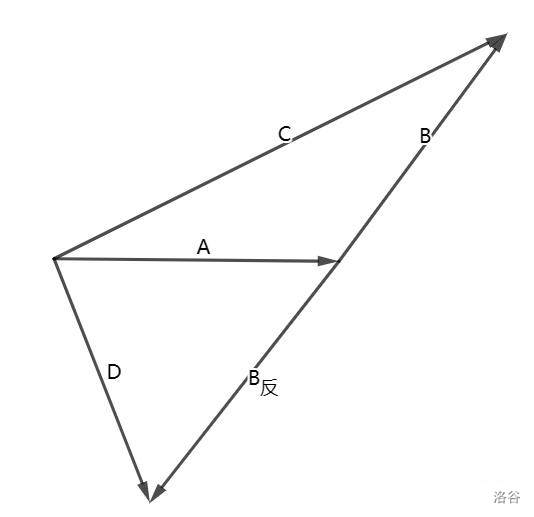
加法不过是两个向量首尾相接,减法不过是其中一个向量反向后再首尾相接。
## 二、向量的点乘
### 2.1定义
两个向量点乘的结果为 $C$ ( $C$ 为实数)
$$
C=\vec{A}\cdot\vec{B}=|\vec{A}||\vec{B}|\cos{\theta}\\
$$
tips:可以把点乘 $\vec{A}\cdot\vec{B}$ 看作是 $|\vec{A}|$ 乘上 $\vec{B}$ 在 $\vec{A}$ 上的投影 $|\vec{B}|\cos{\theta}$ ,或者是是 $|\vec{B}|$ 乘上 $\vec{A}$ 在 $\vec{B}$ 上的**投影**
### 2.2向量点乘的运算律
(1)结合律: $\alpha\vec{A}\cdot\vec{B}=\alpha(\vec{A}\cdot\vec{B})
(2)交换律: \vec{A}\cdot\vec{B}=\vec{B}\cdot\vec{A}
(3)分配律: (\vec{A_1}+\vec{A_2})\cdot\vec{B}=\vec{A_1}\cdot\vec{B}+\vec{A_2}\cdot\vec{B}
【例】证明余弦定理
设 $\vec{C}=\vec{A}+\vec{B}$ ,则有
$$
|\vec{C}|^2=(\vec{A}+\vec{B})^2=(\vec{A}+\vec{B})(\vec{A}+\vec{B})\\
=\vec{A}^2+\vec{B}^2+\vec{A}\vec{B}+\vec{B}\vec{A}\\
=\vec{A}^2+\vec{B}^2+2\vec{A}\vec{B}\\
=|\vec{A}|^2+|\vec{B}|^2+2|\vec{A}||\vec{B}|\cos{\psi}\\
=|\vec{A}|^2+|\vec{B}|^2-2|\vec{A}||\vec{B}|\cos{\theta}\\
$$
## 三、向量的叉乘
### 3.1定义
两个向量叉乘的结果为 $\vec{C}$ ( $\vec{C}$ 为向量)
根据**右手定则**,把手腕放在两个向量的起点处,环握四指,大拇指向上,按照右手定则,依次绕过A向量和B向量,大拇指指向的就是C向量的方向:
$$
|\vec{C}|=|\vec{A}\times\vec{B}|=|\vec{A}||\vec{B}|\sin{\theta}\\
$$
$\vec{C}$ 的方向如下:
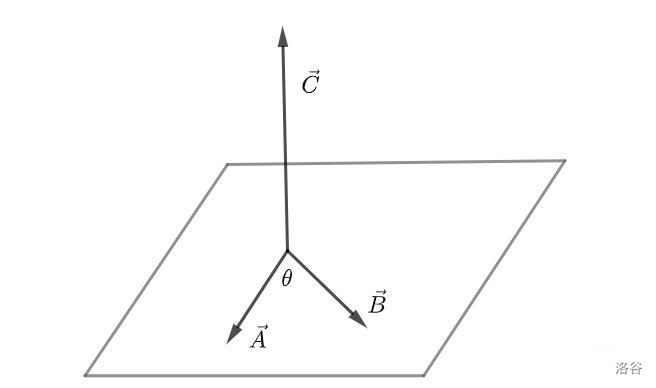
根据右手螺旋定则,右手环握,大拇指朝上直立。手腕放在A和B的起点处,四根手指保证先穿过A,再穿过B,则大拇指的方向即是向量C的方向。
tips:可以把叉乘 $\vec{A}\times\vec{B}$ 看作是 $|\vec{A}|$ 乘上 $\vec{B}$ 在$A$上的高 $|\vec{B}|\sin{\theta}$ ,或者是是 $|\vec{B}|$ 乘上 $\vec{A}$ 在 $\vec{B}$ 上的高 $|\vec{B}|\sin{\theta}$ ,因此底乘高得到的就是面积了。不过这个结论在物理中用处不大,我们只关心 $\vec{C}$ 的方向。
### 3.2向量叉乘的运算律
(1)结合律: $\alpha\vec{A}\times\vec{B}=\alpha(\vec{A}\times\vec{B})
(2)负交换律: \vec{A}\times\vec{B}=-\vec{B}\times\vec{A}
(3)分配律: (\vec{A_1}+\vec{A_2})\times\vec{B}=\vec{A_1}\times\vec{B}+\vec{A_2}\times\vec{B}
四、向量的坐标
4.1向量的坐标表示
定义 :向量的坐标形式表示为(在二维中就是两个坐标,在三维中就是三个坐标)
\vec{A}=(x_1,y_1,z_1) \\
那这是什么意思呢?(先以平面直角坐标系为例)
在二维中其实就是表示从 (0,0) 指向 A(x,y) 的一个向量,同理在三维中就是表示从 (0,0,0) 指向 A(x,y,z) 的一个向量
4.2向量的坐标表示的性质
(1) \vec{A}=\vec{B}\Longleftrightarrow(x_1,y_1,z_1)=(x_2,y_2,z_2)\Longleftrightarrow x_1=x_2,y_1=y_2,z_1=z_2
(2) \vec{A}=(x_1,y_1,z_1) 其中 x_1,y_1,z_1 与坐标系的选取有关(具体看4.3节)
(3) \vec{A}+\vec{B}=(x_1+x_2,y_1+y_2,z_1+z_2)
(4) c\vec{A}=(cx_1,cy_1,cz_1)
(5) \vec{A}\cdot\vec{B}=x_1x_2+y_1y_2+z_1z_2
(6) \vec{A}\times\vec{B}= ?(请看4.3节)
4.3基底
(1)基底的定义
三个沿着坐标轴的单位向量。通常记为 \hat{i},\hat{j},\hat{k} 。
(2)基底的作用
\vec{A}=(x_1,y_1,z_1) =x_1\hat{i}+y_1\hat{j}+z_1\hat{k}\\
这样就可以利用交换律、结合律、分配律进行向量运算了。
(3)基底的基本运算
大家回忆一下点乘和叉乘的基本运算法则,我们可以得到:
\hat{i}\cdot\hat{i}=\hat{j}\cdot\hat{j}=\hat{k}\cdot\hat{k}=1\\
\hat{i}\times\hat{i}=\hat{j}\times\hat{j}=\hat{k}\times\hat{k}=0\\
\hat{i}\times\hat{j}=\hat{k},\hat{j}\times\hat{k}=\hat{i},\hat{k}\times\hat{i}=\hat{j}\\
\hat{j}\times\hat{i}=-\hat{k},\hat{k}\times\hat{j}=-\hat{i},\hat{i}\times\hat{k}=-\hat{j}\\
(4)基底的向量运算
① 向量的模
|\vec{A}|^2=(x\hat{i}+y\hat{j}+z\hat{k})(x\hat{i}+y\hat{j}+z\hat{k})\\
= x^2\hat{i}\cdot\hat{i}+xy\hat{i}\cdot\hat{j}+xz\hat{i}\cdot\hat{k} + yx\hat{j}\cdot\hat{j}+y^2\hat{j}\cdot\hat{j}+yz\hat{j}\cdot\hat{k} + zx\hat{k}\cdot\hat{i}+zy\hat{k}\cdot\hat{j}+z^2\hat{k}\cdot\hat{k}\\
=x^2+y^2+z^2\\
②向量点乘
\vec{A}\cdot\vec{B}=(x_1\hat{i}+y_1\hat{j}+z_1\hat{k})(x_2\hat{i}+y_2\hat{j}+z_2\hat{k})\\
= x_1x_2\hat{i}\cdot\hat{i}+x_1y_2\hat{i}\cdot\hat{j}+x_1z_2\hat{i}\cdot\hat{k} + y_1x_2\hat{j}\cdot\hat{j}+y_1y_2\hat{j}\cdot\hat{j}+y_1z_2\hat{j}\cdot\hat{k} + z_1x_2\hat{k}\cdot\hat{i}+z_1y_2\hat{k}\cdot\hat{j}+z_1z_2\hat{k}\cdot\hat{k}\\
=x_1x_2+y_1y_2+z_1z_2\\
③向量叉乘
\vec{A}\times\vec{B}=(x_1\hat{i}+y_1\hat{j}+z_1\hat{k})\times(x_2\hat{i}+y_2\hat{j}+z_2\hat{k})\\
= x_1x_2\hat{i}\times\hat{i}+x_1y_2\hat{i}\times\hat{j}+x_1z_2\hat{i}\times\hat{k} + y_1x_2\hat{j}\times\hat{j}+y_1y_2\hat{j}\times\hat{j}+y_1z_2\hat{j}\times\hat{k} + z_1x_2\hat{k}\times\hat{i}+z_1y_2\hat{k}\times\hat{j}+z_1z_2\hat{k}\times\hat{k}\\
=(y_1z_2-y_2z_1)\hat{i}+(z_1x_2-x_1z_2)\hat{j}+(x_1y_2-x_2y_1)\hat{k}\\
这个公式在高中阶段不怎么会用到(但是可以背下来装一装,也可以用行列式,可以自行查找,浅尝辄止即可),不过从上面的两个式子我们可以发现,理论上已知两个向量求叉乘会比求点乘慢1~2倍。
五、总结
1、不仅要了解向量点乘和叉乘的基本算术定义,也就是点乘是两向量的模乘上角度余弦,叉乘是两向量的模乘上角度正弦。
2、要关注到,点乘所得到的是一个数值(后面会学到,这是一个标量),叉乘所得到的是另一个向量。
3、同时需要注意到向量叉乘的方向问题,遵循右手定则。
4、需要注意到基底的问题,只有在直角坐标系下运算才能把许多干扰项去掉,因此选对坐标系很重要。