细说虚功原理
pjykk
·
·
个人记录
文章导航
认真讲一下。
需要简单的微积分和基础的力学知识。
向量用黑体表示。为了方便,我们会用牛顿上面加点的方式表示对时间的导数。
0. 基本概念
我们考虑一个质点系(系统)。系统内所有质点位置的集合称为位形。
然后系统要受到一些约束来限制位形的变化,比如物块放到平面上不能掉下去,平面限制了小物块位置的变化。
一般来说,约束可以写成这样的形式:
f(\bold{r}_1,\cdots,\bold{r}_n,\dot{\bold{r}}_1,\cdots,\dot{\bold{r}}_n,t)=0
上面的式子比较抽象,这里作简单说明。
-
我们的约束包含三部分:对位移的约束,对速度的约束,时间。按照传统牛顿运动定律的观点,实际上给定位移和速度,加上动力学方程就能唯一确定之后的状态,因此位移和速度就唯一确定了系统的状态,而约束就是来限制系统的状态的。
-
上面的式子写出的约束称为双面约束,因为右边是等号。实际上真实物理世界中很多约束是单面的,比如说单摆中绳子对小球的约束,只限制了小球到中心的距离不超过绳长,而非等于绳长。但是如果小球到中心的距离小于绳长,此时约束相当于被解除了,我们就不需要管它了。因此我们主要考虑双面约束的情况。
-
实际中的约束并不都会像上面式子写的那样复杂。比如很多约束是不随时间改变(不显含时间)的,这样的约束称为定常约束,反之称为非定常约束。再如刚体上两质点间的约束仅要求它们之间的距离不变,而没有约束速度,这样的约束称为几何约束。约束还可以进行更细致的分类,但对于静力学问题,我们无需考虑复杂,一般只考虑定常的几何约束。
约束带来的力称为约束(反)力,比如物块放在水平面上,弹力是为了满足平面约束而必须有的,它是一种与违背约束相对抗的反作用力;而对应的重力称为主动力,它不是依赖于约束而存在的。
1. 虚位移,理想约束,虚功原理
仅仅有约束我们还不足以确定运动状态。比如将静止物块放在水平面上后,仅依靠约束,它有可能向各个方向运动(也可能静止);然而实际上由动力学规律,它只可能静止。上面所谓 “可能” 的位移指的是符合约束的位移,我们称为虚位移,这是我们想象出来的,并非实际的运动(时间并没有变化)。对于定常约束,真实的位移就是虚位移中的一个(指的是 “看上去” 一模一样)。我们研究问题的步骤就是先确定符合约束的位移,然后再判定哪个虚位移是真实位移。在传统方法中,我们需要启动牛顿第二定律才能得到真实位移;但我们也可以使用另外的方法,通过一系列判定条件(比如下面的虚功原理)来确定真实位移,这就是分析力学的思想。
上面的文字只是一个较为粗略的对思路的描述,有必要做一些更深入的说明。
我们考察的都是无穷小的虚位移,用 \delta\bold{r} 表示。这里 \delta 是等时变分符号。变分符号与微分符号的区别是,微分的 \mathrm{d}\bold{r} 指的是,实际情况中,经过极小时间 \mathrm{d}t,位置矢量的变化量,即一个极小的实位移,同时伴随时间的增加;而变分指的是,对于原来这个状态进行微扰(或者认为单纯只是另外一个位形接近的状态)带来的变化(虚位移),此时时间并没有变化,即 \delta t=0(所以称为 “等时” 变分)。画一个图:
(为了更好表示,上面的图画的是标量 r,下面推导也写标量)
我们考察 (t,r) 处的点,我们会发现,对这个点先微分再变分与先变分再微分的结果是完全相同的。于是我们有:
r+\mathrm{d}r+\delta(r+\mathrm{d}r)=r+\delta r+\mathrm{d}(r+\delta r)
$$\mathrm{d}(\delta r)=\delta(\mathrm{d}r)$$
这被称为 $\delta$ 与 $\mathrm{d}$ 的可对易性:它们可以进行任意交换,运算规则也相同,它们只是因为表示意义不同而有不同的符号。
引入虚位移的一大好处是,大多数约束力做的虚功为零。这里“虚功”的意思是力和虚位移的点乘,并不是一种实际的功。约束力做的虚功为零的约束称为理想约束。
下面这些约束都是理想约束:
与光滑表面接触;光滑铰接;质点用张紧且不可伸长轻绳连接……
> 如果是静力平衡的情况那么上面这些都是显然的。这里说明一下,在非定常条件下质点光滑表面接触(光滑表面不属于系统)也是理想约束。
>
> 我们设光滑表面带来的约束为 $f(x,y,z,t)=0$(光滑表面可以运动),那么虚位移应当满足:
>
> $$\dfrac{\partial f}{\partial x}\delta x+\dfrac{\partial f}{\partial y}\delta y+\dfrac{\partial f}{\partial z}\delta z=0$$
>
> 如果使用 $\mathrm{d}$ 的话(也就是实际情况下),应当有 $\dfrac{\partial f}{\partial t}\mathrm{d} t$ 这一项,实际做的功并不为零。然而注意虚位移的定义,$\delta t=0$,虚位移是被限制在某一时刻的切向上的。
由理想约束下约束力不做功,我们记质点 $i$ 受到的主动力为 $\bold{F}_i$,约束力为 $\bold{N}_i$,作虚位移 $\delta\bold{r}_i$。在理想约束的条件下,有:
$$\delta W=\sum\limits_{i=1}^{n}(\bold{F}_i+\bold{N}_i)\cdot\delta\bold{r}_i=\sum\limits_{i=1}^{n}\bold{F}_i\cdot\delta\bold{r}_i=0$$
这就得到虚功原理:
具有理想约束的质点系达到平衡的充分必要条件是在任何虚位移上,主动力做的虚功的和为零。
(必要性证明不难)
这给了我们只需作出主动力就能做题的方法。试试看!
**例 1.1** 如图,现有线密度为 $\lambda$ 的均质链条,它静止悬挂时两端各受的力为 $T_1,T_2$,两端高度差为 $h$。证明 $T_2-T_1=\lambda gh$.
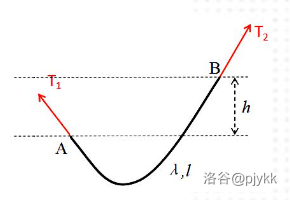
自然想到应当考虑沿原来绳子的方向的虚位移,但是首先有一个问题是,绳子的形状会变,然后什么都变了,算不了一点。
这里的技巧是,直接把条件改了,让绳子不是自由垂落,而是用一个和原来绳子形状相同的光滑管套在绳子外面。这样并不会改变各个力的大小,但是能使绳子只沿原方向,相当于减小了自由度。
此时仍然保证理想约束。由重力(保守力)做功的性质及虚功原理得
$$T_2\delta s-T_1\delta s-\lambda gh\delta s=0$$
即得结论。
我们再来看一个流体的问题(帕斯卡定律)。
**例 1.2** 如图,容器内有不可压缩的流体且处于平衡状态,忽略活塞摩擦及重力,求证 $\dfrac{P_1}{S_1}=\dfrac{P_2}{S_2}=\dfrac{P_3}{S_3}$.(尊重原图,用 $P$ 表示力)
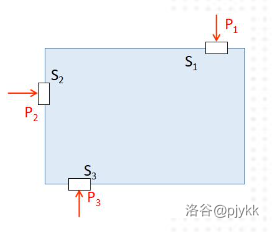
考虑一个 $P_1$ 处向内压的虚位移 $\delta x_1$,此时 $P_2,P_3$ 处分别有向外虚位移 $\delta x_2,\delta x_3$,由体积不变及虚功原理:
$$S_1\delta x_1-S_2\delta x_2-S_3\delta x_3=0\\P_1\delta x_1-P_2\delta x_2-P_3\delta x_3=0$$
消去 $\delta x_1$ 得
$$\left(\dfrac{P_1S_2}{S_1}-P_2\right)\delta x_2+\left(\dfrac{P_1S_3}{S_1}-P_3\right)\delta x_3=0$$
这时,关键在于 $\delta x_2$ 和 $\delta x_3$ 是独立的,因此我们只能让两个括号内式子都为 $0$,化简即得结论。
从这个例子可以看出,最后我们需要化为互相独立的虚位移的线性组合的形式,这就要求我们需要把不独立的虚位移消掉。
虚功原理能够大量减少约束力的分析。经典的例子是这个题:
**例 1.3** 如图由四根长 $L$ 重 $mg$ 的杆和四根长 $2L$ 重 $2mg$ 的杆光滑铰接而成,杆间夹角均为直角。一根不可伸长的细绳连接两铰接点,求细绳的拉力 $T$。
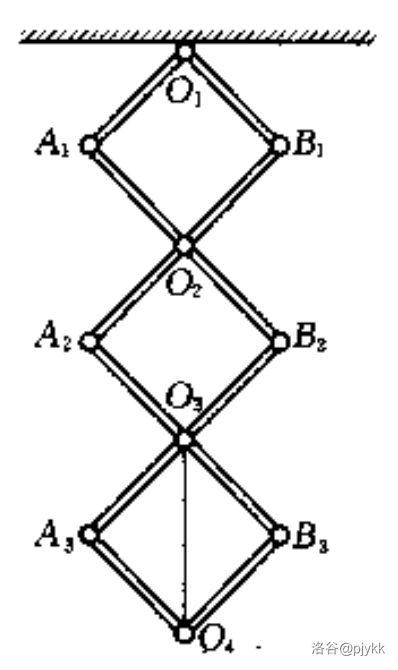
$T$ 是约束力,但也可以用虚功原理求。做法简单粗暴,就是直接解除约束,把绳子扬了,用两个主动力 $T$ 来替代。
设 $O_2$ 点有向下虚位移 $\delta x$,根据比例关系易得其它各点的虚位移,直接列式子:
$$T\cdot 2\delta x-T\cdot 3\delta x+2\cdot mg\cdot\dfrac{1}{4}\delta x+2\cdot 2mg\cdot\delta x+2\cdot 2mg\cdot2\delta x+2\cdot mg\cdot\dfrac{11}{4}\delta x=0$$
得 $T=18mg$,做完了。
但是来看这个平衡题:
**例 1.4** 如图,质量为 $m$ 的均匀细杆与光滑表面相切,求平衡时杆与水平面的夹角 $\theta$ 与图中长度的关系。
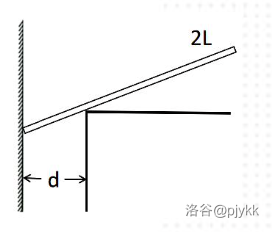
按照之前虚位移的理论,我们考虑一个质心的虚位移 $\delta r$。只有重力为主动力,虚位移 $\delta r$ 仅有竖直方向的分量 $\delta y$ 对做功有贡献,于是
$$-mg\delta y=0$$
$m=0$ 疑似有点扯了,所以得到平衡位置 $\delta y=0$。
这里有一个问题,就是我们本来是希望是要做虚位移的,结果最后解出所设的“虚位移”根本不存在,这里所谓的虚位移是不符合定义的,只是在数学上满足这样的关系。
不过在这个题中我们可以用数学方法处理。
为了解出关系我们先用 $\theta$ 表示 $y$ (以水平面为高度零点)得
$$L\sin\theta-d\tan\theta=y$$
同取 $\delta$ 得
$$L\cos\theta\delta\theta-\dfrac{d}{\cos^2\theta}\delta\theta=\delta y=0$$
这下 $\delta\theta$ 总不可能为 $0$ 了,于是得到
$$\cos^3\theta=\dfrac{d}{L}$$
我们能够明显感受到这道题与前面两道题的区别,直接用虚功原理遇到了困难。我们把一些问题总结在这里:
* 首先 “虚位移” 本身就是一个比较抽象的概念。我们为消掉约束力引入了虚位移,但是虚位移这个东西又高度依赖约束,结果是找合适的虚位移反而成了困难的部分了。有时我们设了看似有的虚位移,结果最后实际上并不存在。并且我们不知道要怎么判断这种情况,只能推矛盾。
* 注意上面对于虚功原理的讨论是基于虚 “位移” 的,首先要有位移。但有时用位移来表示是相当复杂的,不如直接用一个 $\theta$。
* 虚位移的不独立。写出虚位移之后需要找出虚位移间关系进行消元。
解决这些问题的方案其实上面已经有了:不拘泥于 “位移”,也可以使用 $\theta$ 这样的东西来表示。这就引出了广义坐标。
## 2. 广义坐标下的虚功原理
广义坐标指的是一组独立的参数 $q_1,\cdots,q_s$,用它们能够唯一确定系统位形。广义坐标的个数 $s$ 称为系统(有限运动中)的自由度。
举一个经典的例子,考虑一个单摆(摆角不超过 $90^{\circ}$)。
* 我们可以用单独的角度 $\theta$ 来表示位形,单独的 $\theta$ 是广义坐标。
* 单独的 $x$ 也是广义坐标,但是显然不如 $\theta$ 好。
* 单独的 $y$ 不是广义坐标,因为无法区分左右两状态。
* $(x,y)$ 不是广义坐标,因为两个参数不相互独立。
> “无法区分左右两状态” 这句话道出了 **例 1.4** 中出现 $\delta y=0$ 的根本原因。那个题的平衡状态就像是单摆的平衡状态(只是稳定性有差别)。
因为使用广义坐标就已经能唯一确定位形,我们无需再找出坐标间关系(不用管约束方程了)。
类比原有的运动学概念,广义坐标关于时间的导数称为广义速度。在我们目前讨论的问题(完整约束)中,广义速度、广义坐标的变分也是相互独立的。
接下来我们尝试将广义坐标代入到虚功原理的式子中。
设位矢 $\bold{r}_i=\bold{r}_i(q_1,\cdots,q_s,t)$,取变分有
$$\delta\bold{r}_i=\sum\limits_{\alpha=1}^s\dfrac{\partial\bold{r}_i}{\partial q_\alpha}\delta q_\alpha$$
代入到虚功原理的式子中有
$$\begin{aligned}\delta W&=\sum\limits_{i=1}^{n}\bold{F}_i\cdot\delta\bold{r}_i\\&=\sum\limits_{i=1}^{n}\bold{F}_i\cdot\sum\limits_{\alpha=1}^s\dfrac{\partial\bold{r}_i}{\partial q_\alpha}\delta q_\alpha\\&=\sum\limits_{\alpha=1}^{s}\left(\sum\limits_{i=1}^n\bold{F}_i\cdot\dfrac{\partial\bold{r}_i}{\partial q_\alpha}\right)\delta q_\alpha\\&=0\end{aligned}$$
与初始时的虚功原理作比较,我们可以定义广义力
$$Q_{\alpha}=\sum\limits_{i=1}^n\bold{F}_i\cdot\dfrac{\partial\bold{r}_i}{\partial q_\alpha}$$
于是有
$$\delta W=\sum\limits_{\alpha=1}^sQ_{\alpha}\delta q_\alpha=0$$
因为广义坐标的优秀性质(相互独立和唯一确定性),我们有
$$Q_{\alpha}=0$$
我们可以看到,这个式子就不再包含原来的“虚位移”,是一个更加确定的形式。
实际上我们并不会对每个广义坐标求广义力,即直接用上面的式子进行运算,而是考虑每个主动力,计算它作的虚功。比如下面这道例题:
**例 2.** 如图,杆 $OA,AB$ 长度分别为 $l_1,l_2$,各铰接处光滑,求 $\varphi_1,\varphi_2$。
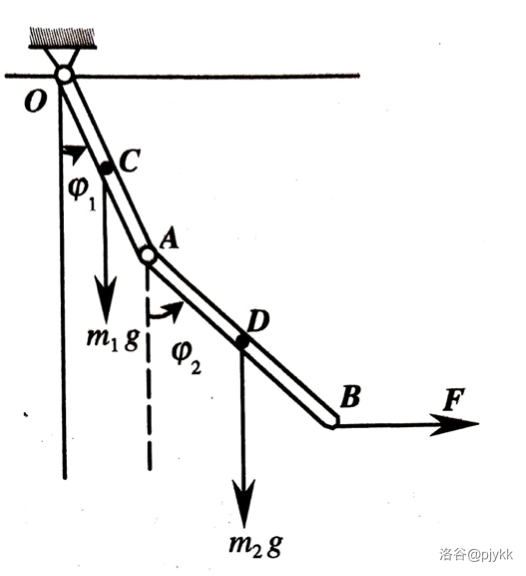
容易判定符合使用虚功原理的条件。我们取广义坐标 $\varphi_1,\varphi_2$,并以水平向右为 $x$ 轴正方向,以水平向下为 $y$ 轴正方向。
要算做功,只需表示 $y_C,y_D,x_B$,具体地,有:
$$y_C=\dfrac{1}{2}l_1\cos\varphi_1\\y_D=l_1\cos\varphi_1+\dfrac{1}{2}l_2\cos\varphi_2\\x_B=l_1\sin\varphi_1+l_2\sin\varphi_2$$
取变分,有
$$\delta y_C=-\dfrac{1}{2}l_1\sin\varphi_1\delta\varphi_1\\\delta y_D=-l_1\sin\varphi_1\delta\varphi_1-\dfrac{1}{2}l_2\sin\varphi_2\delta\varphi_2\\\delta x_B=l_1\cos\varphi_1\delta\varphi_1+l_2\cos\varphi_2\delta\varphi_2$$
由虚功原理,
$$m_1g\delta y_C+m_2g\delta y_D+F\delta x_B=0$$
代入化简得
$$(Fl_1\cos\varphi_1-\dfrac{1}{2}m_1gl_1\sin\varphi_1-m_2gl_1\sin\varphi_1)\delta\varphi_1+(Fl_2\cos\varphi_2-\dfrac{1}{2}m_2gl_2\sin\varphi_2)\delta\varphi_2=0$$
于是有
$$\begin{cases}Fl_1\cos\varphi_1-\dfrac{1}{2}m_1gl_1\sin\varphi_1-m_2gl_1\sin\varphi_1=0\\\\Fl_2\cos\varphi_2-\dfrac{1}{2}m_2gl_2\sin\varphi_2=0\end{cases}$$
解得
$$\begin{cases}\varphi_1=\arctan\left(\dfrac{2F}{(m_1+2m_2)g}\right)\\\\\varphi_2=\arctan\left(\dfrac{2F}{m_2g}\right)\end{cases}$$
练习:用类似的方法完成 **例1.4**
总结一下,我们做题的步骤是这样的:
1. 判定约束为双面、定常、几何、理想的约束。如果要求约束力,需要解除约束,用主动力替换(**例 1.3**)。
2. 判断自由度,选取合适的广义坐标。
3. 将每个主动力的作用点的位置用广义坐标表示。
4. 作变分,求出虚功。
5. 按广义坐标合并同类项,令各项为零,解方程组即得。
## 3. 保守系统下的虚功原理与平衡的稳定性
很多主动力,比如恒力(重力可看作一种恒力),引力,库仑力,弹簧弹力等都属于保守力,有势能相对应。因此对于保守系统,我们可以使用势能来表示稳定条件。下面我们具体推导一下。
设势能函数为 $V$,由势能定理有
$$\delta V=-\delta W=-\sum\limits_{\alpha=1}^sQ_{\alpha}\delta q_\alpha$$
由对易性 $\delta$ 可理解为 $\mathrm{d}$,我们立刻得到
$$Q_\alpha=-\dfrac{\partial V}{\partial q_\alpha}$$
由 $Q_\alpha=0$,我们最终得到
$$\dfrac{\partial V}{\partial q_\alpha}=0$$
上面的式子意义明显,就是说物体的平衡位置就是势能取驻值的位置。
实际上对于 **例 1.4**,我们最后的做法中 $\delta y=0$ 就相当于(重力)势能取极值。
然而并不是所有的平衡位置都是我们在日常生活中能够见到的。比如考虑一个半球面,我们将一个小球放到上面,它几乎必然会滑下;或者说,即使恰好将它放在了正上方,给一个任意小的微扰,它都会远离平衡位置滑下。我们称这种平衡为不稳定平衡。反过来,如果是半球碗内的球,那么即使给定一个微扰,它也会回复到原来的位置,这种平衡称为稳定平衡。另外我们还有随遇平衡的概念,指的是经过微扰后,物体停留在微扰后的位置,既不远离平衡位置,也不回复到平衡位置。
值得注意的是,引入势能函数,我们可以比较方便地得到平衡的稳定性。我们可以粗略认为,极值点的种类对应着稳定性的种类。简单来说,稳定平衡一般对应着势能函数的极小值,而不稳定平衡一般对应着势能函数在平衡位置不取严格极小值。随遇平衡则意味着势能函数在对应位置周围非无穷小的部分为定值。(这里的说法都不是很严谨;平衡稳定性的证明过于复杂,这里直观理解即可)
对仅一个广义坐标的情况(一元势函数),我们可以简单地对其进一步求导,判断二阶导数的符号即可。
> 若仅有重力势能,此时就是受力分析中所谓“重心升降法”的原理。
**例 3.1** 试判断 **例 1.4** 中平衡的稳定性。
重力势能只与纵坐标有关,只写纵坐标即可。我们沿用先前的符号,
$$\begin{aligned}y&=L\sin\theta-d\tan\theta\\\dfrac{\mathrm{d}y}{\mathrm{d}\theta}&=L\cos\theta-\dfrac{d}{\cos^2\theta}\\\dfrac{\mathrm{d}^2y}{\mathrm{d}\theta^2}&=-L\sin\theta-\dfrac{2d\sin\theta}{\cos^3\theta}<0\end{aligned}$$
因此为不稳定平衡。
**例 3.2** 如图,匀质杆 $AB$ 长度为 $l$,各接触面光滑。若杆在 $Oxy$ 平面上任意位形都为平衡位置,求柱面方程。
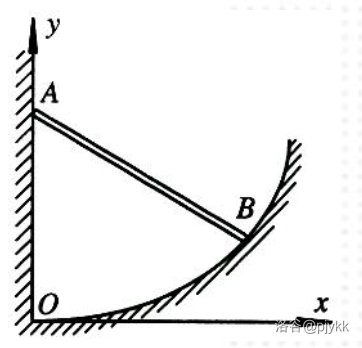
随遇平衡意味着势能为常数,杆的重心高度不变。考虑竖直放置,此时重心高度为 $\dfrac{l}{2}$。设 $B(x,y)$,容易得到
$$\left(\dfrac{l}{2}-y\right)^2+\left(\dfrac{x}{2}\right)^2=\left(\dfrac{l}{2}\right)^2$$
这就得到柱面方程。柱面在 $Oxy$ 平面上的截面为椭圆(的一部分)。
下面两个例子相对复杂一点。
**例 3.3** 如图,大圆环光滑,$A$ 为光滑小环,其上系两段绳子。$B$ 为光滑定滑轮,大小不计,两物体 $C,D$ 重力分别为 $P,G$,$D$ 与大圆环间无弹力。求平衡时的 $\varphi$ 及平衡稳定性。
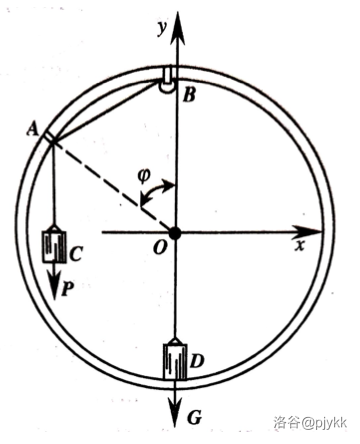
设 $CA$,$ABD$ 段绳长分别为 $l,L$,半径为 $R$,直接写重力势能
$$V=P(R\cos\varphi-l)+G(R-L+2R\sin\dfrac{\varphi}{2})$$
求导
$$\dfrac{\mathrm{d}V}{\mathrm{d}\varphi}=-PR\sin\varphi+GR\cos\dfrac{\varphi}{2}=0$$
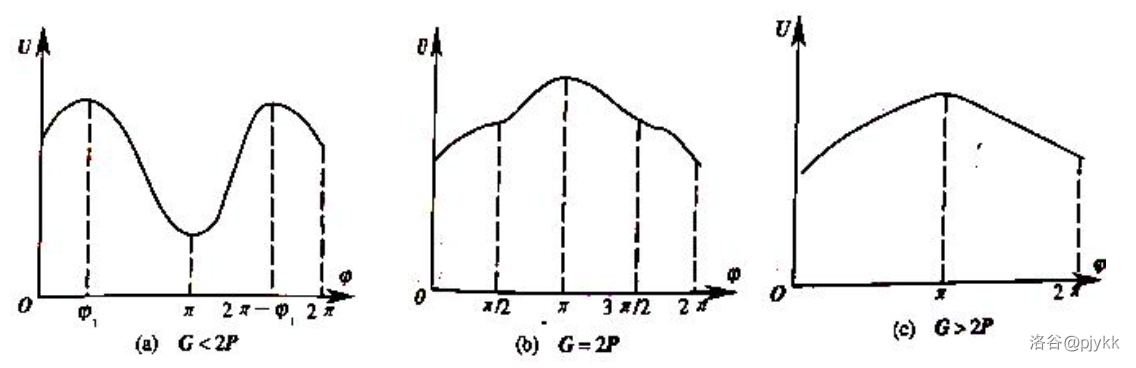
解得 $\varphi_1=\arcsin\dfrac{G}{2P}$,注意有可能不存在。
这里对于势能函数的讨论比较复杂,略去,直接给出最后的势能曲线:
**例 3.4** 如图,光滑圆环半径为 $R$,以 $\omega$ 角速度匀速转动。一根长 $L=\sqrt{2}R$ 的细杆放于环上,杆中心与圆心的连线与竖直方向夹角为 $\theta$。求平衡时 $\theta$ 大小,并讨论平衡稳定性。
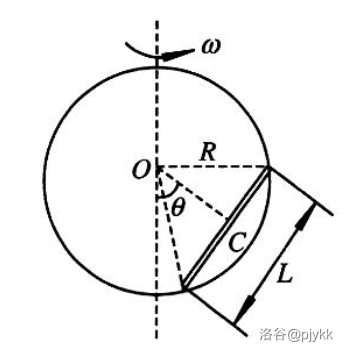
显然考虑换系,此时多出一项惯性离心力 $F^{*}=m\omega^2r$。
注意惯性离心力的大小只与到圆心的距离有关,我们可以引入离心势能。先算做功(注意力的方向向外)
$$W^*=\int_{r_1}^{r_2}m\omega^2r\mathrm{d}r=\dfrac{1}{2}m\omega^2r_2^2-\dfrac{1}{2}m\omega^2r_1^2$$
由 $\Delta V^*=-W^*$ 对比得
$$V^*=-\dfrac{1}{2}m\omega^2r^2$$
考虑整根杆,由长度关系注意到杆所对圆心角为 $90^\circ$,设线密度 $\lambda=\dfrac{m}{\sqrt{2} R}$,有总离心势能
$$\begin{aligned}V^*&=-\dfrac{1}{2}\omega^2\int_{0}^{\sqrt{2}R}(R\sin(\theta-45^\circ)+x\cos\theta)^2\lambda\mathrm{d}x\\&=-\left(\dfrac{1}{4}-\dfrac{1}{6}\cos^2\theta\right)m\omega^2R^2\end{aligned}$$
以 $O$ 为零势能点,又有重力势能 $V_G=-\dfrac{\sqrt{2}}{2}mgR\cos\theta
因此杆总势能
V=V_{G}+V^*=-\dfrac{\sqrt{2}}{2}mgR\cos\theta-\left(\dfrac{1}{4}-\dfrac{1}{6}\cos^2\theta\right)m\omega^2R^2
注意到这是关于 \cos\theta 的二次方程,有
V=\dfrac{1}{6}m\omega^2R^2\left(\cos\theta-\dfrac{3\sqrt{2}g}{2\omega^2R}\right)^2-\dfrac{1}{4}m\omega^2R^2-\dfrac{3mg^2}{4\omega^2}
当 \cos\theta=\dfrac{3\sqrt{2}g}{2\omega^2R} (若存在)时,V 取最小值,为稳定平衡。
再考虑 $\theta=0$,可以算出:
* 当 $\dfrac{3\sqrt{2}g}{2\omega^2R}\geq1$ 时,为稳定平衡;
* 当 $\dfrac{3\sqrt{2}g}{2\omega^2R}<1$ 时,为不稳定平衡。
## 4. 后面是什么?
简单介绍一点动力学问题的处理方案,基本上就是列举结论。
对于动力学问题,我们有时也会将它转化为静力学问题来进行解决。方法就是引入我们常说的“惯性力”。
我们记质点 $i$ 质量为 $m_i$,受到的主动力为 $\bold{F}_i$,约束力为 $\bold{N}_i$,位移为 $\bold{r}_i$,我们可以列出方程:
$$\bold{F}_i+\bold{N}_i=m_i\ddot{\bold{r}}_i$$
此时我们将右边一项移到左边:
$$\bold{F}_i+\bold{N}_i-m_i\ddot{\bold{r}}_i=0$$
将 $-m_i\ddot{\bold{r}}_i$ 这一项看作惯性力。在理想约束条件下,有
$$\delta W=\sum\limits_{i=1}^n(\bold{F}_i-m_i\ddot{\bold{r}}_i)\delta\bold{r}_i=0$$
此式称达朗贝尔原理,也叫做动力学普遍方程。
接下来我们将广义坐标代入,设位矢 $\bold{r}_i=\bold{r}_i(q_1,\cdots,q_s,t)$,与之前相似,得到
$$\delta W=\sum\limits_{\alpha=1}^s\left(Q_{\alpha}-\sum\limits_{i=1}^n m_i\ddot{\bold{r}}_i\dfrac{\partial\bold{r}_i}{\partial q_\alpha}\right)\delta q_\alpha$$
这可以使用一些技巧化简得到(不细推了)
$$\delta W=\sum\limits_{\alpha=1}^s\left(Q_{\alpha}-\dfrac{\mathrm{d}}{\mathrm{d}t}\dfrac{\partial T}{\partial \dot{q_\alpha}}+\dfrac{\partial T}{\partial q_\alpha}\right)\delta q_\alpha=0$$
其中 $T$ 为系统动能,即满足
$$T=\sum\limits_{i=1}^n\dfrac{1}{2}m_i|\dot{\bold{r}}_i|^2$$
最终得到拉格朗日方程
$$\dfrac{\mathrm{d}}{\mathrm{d}t}\dfrac{\partial T}{\partial \dot{q_\alpha}}-\dfrac{\partial T}{\partial q_\alpha}=Q_{\alpha}$$
当为保守力系时代入 $Q_\alpha$ 可得结论
$$\dfrac{\mathrm{d}}{\mathrm{d}t}\dfrac{\partial L}{\partial \dot{q_\alpha}}-\dfrac{\partial L}{\partial q_\alpha}=0$$
其中 $L$ 为拉格朗日量,满足
$$L=T-V$$
一个方程就把(完整系下的)动力学写明白了,非常厉害。