凸包【模板】
hicc0305
2018-04-23 10:54:22
一看到凸包我是懵逼的,心想这是什么难度,我这种蒟蒻能学会么。
一看发现还是蛮简单的哈
我这里介绍常用的Graham扫描法,时间复杂度是nlogn
要学这种算法,先要知道一种叫叉积的东西
对于点A(x1,y1),B(x2,y2),C(x3,y3),向量AB与向量AC的叉积为(x2-x1)(y3-y1)-(x3-x1)(y2-y1),若叉积大于零,逆时针上两条边的夹角小于180°,反之则大于180°,等于零则共线。C在直线AB的逆时针方向,还是顺时针方向,简单来说,也就是在上面还是在下面。
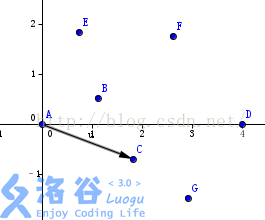
根据常识,我们可以知道最左下角的点一定是凸包上的(你喜欢最左上,最右上。。也一样)。然后我们可以通过这个点去扩展出凸包,like this:
先加入点A、C
插入第三个点G
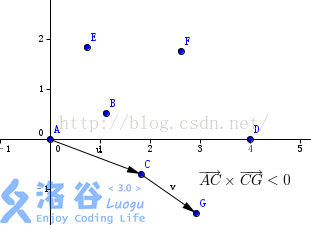
计算AC×CG的叉积,却发现叉积小于0,也就是说逆时针方向上∠ACG大于180度,于是删去C点,加入G点
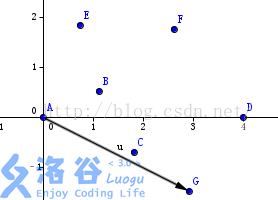
同理,一步一步的做
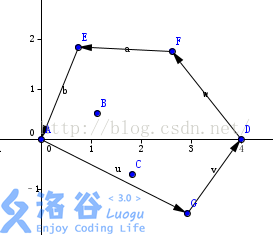
那怎么找到点C呢?以A为原点,对其他点进行极角排序,也就是把A和其他点的连线按辐角排序。辐角是什么呢
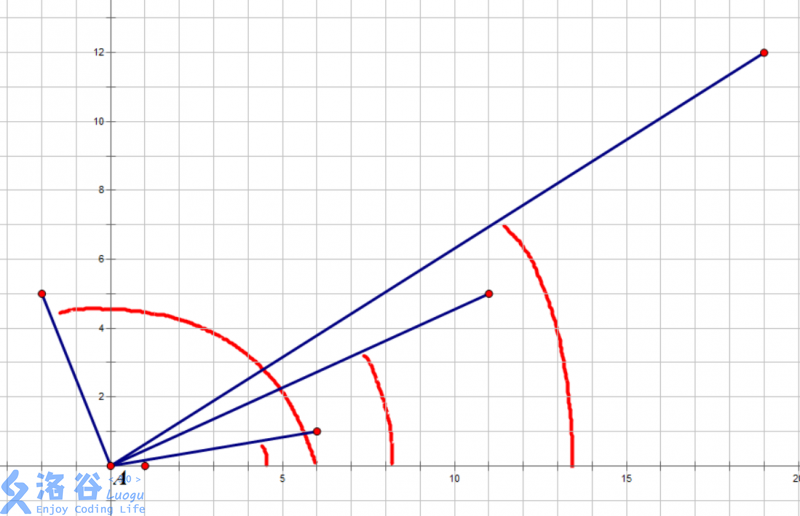
就是这样,于是辐角最小的就是C点啦,用脚想想都知道C必定得选的,当然辐角最大的也必定得选。你可以从辐角最小的点逆时针扩展,当然也可以从辐角最大的点顺时针扩展。
程序详细步骤如下:
1.把所有点放在二维坐标系中,则纵坐标最小的点一定是凸包上的点
2.把所有点的坐标平移一下,使 A 作为原点
3.计算各个点相对于 A 的幅角 α ,按从小到大的顺序对各个点排序。当 α 相同时,距离 A 比较近的排在前面。我们由几何知识可以知道,结果中第一个点 B 和最后一个点一定是凸包上的点。
(以上是准备步骤,以下开始求凸包)
以上,我们已经知道了凸包上的第一个点 A 和第二个点 B,我们把它们放在栈里面。s[1]=A,s[2]=B.现在从步骤3求得的那个结果里,把 B 后面的那个点拿出来做当前点。此时栈顶指针top=2
4.连接s[top-1]和s[top]这两个点,得到直线 L 。看当前点是在直线 L 的右边还是左边。如果在直线的右边就执行步骤5;如果在直线上,或者在直线的左边就执行步骤6。
5.如果在右边,则s[top]不是凸包上的点,把栈顶元素出栈。执行步骤4。
6.当前点是凸包上的点,把它压入栈,执行步骤7。
7.检查当前点是不是步骤3那个结果的最后一个元素。是最后一个元素的话就结束。如果不是的话就把 P2 后面那个点做当前点,返回步骤4。
最后,栈中的元素就是凸包上的点了。
------------
程序如下
```cpp
#include<cstdio>
#include<cstring>
#include<iostream>
#include<algorithm>
using namespace std;
int n;
struct node
{
int x,y;
}p[50100],s[100100];
int cross(node a,node b,node c)//计算叉积
{
return (b.x-a.x)*(c.y-a.y)-(c.x-a.x)*(b.y-a.y);
}
int dis(node a,node b)
{
return (a.x-b.x)*(a.x-b.x)+(a.y-b.y)*(a.y-b.y);
}
bool cmp1(node a,node b)
{
if(a.y==b.y) return a.x<b.x;
return a.y<b.y;
}
bool cmp2(node a,node b)//极角排序
{
int k=cross(s[1],a,b);
if(k>0) return 1;
else if(k==0 && dis(s[1],a)<=dis(s[1],b)) return 1;//共线的话就把距离近的排在前面
else return 0;
}
int main()
{
scanf("%d",&n);
for(int i=1;i<=n;i++)
scanf("%d%d",&p[i].x,&p[i].y);
sort(p+1,p+n+1,cmp1);//按横纵坐标排序,得出最左下角的点
s[1]=p[1];
sort(p+2,p+n+1,cmp2);//极角排序
s[2]=p[2];//得到辐角最小的点,入栈
int top=2;
for(int i=3;i<=n;i++)
{
while(cross(s[top-1],s[top],p[i])<0) top--;//比较当前点在直线的右边还是左边。在右边就一直弹栈顶
s[++top]=p[i];//进栈
}
for(int i=1;i<=top;i++)
cout<<s[i].x<<" "<<s[i].y<<endl;
return 0;
}
```